
1. Task Description
The main task of the trajectory planning system of the composite robot is to comprehensively consider the three-dimensional space size, the working radius and dynamic constraints of the robot, and use the space optimization algorithm to optimize the motion path and the motion path of the composite robot, so as to ensure that the robot can perform high-precision shooting operations in a collision free environment, and finally output the position and pose information of the composite robot for each shooting target point and shooting transition point.
2. Overall system framework
The overall framework of the composite robot trajectory planning system is shown in Figure 1. The main functions of the system are as follows:
(1) The coordinate system of the whole measurement system is established according to the structure size of the composite robot and the size of the test site;
(2) The kinematics model of the composite robot is built in the coordinate system of the measurement system;
(3) In the three-dimensional space, import the coordinate position of the shooting point of the visual measurement system;
(4) Call the trajectory planning algorithm of the mobile manipulator, output the coordinates of each key path point during the composite robot shooting operation, call the multi joint interpolation algorithm, and output the coordinate position or joint rotation angle information of each motion joint of the composite robot;
(5) The planned shooting point information is sent to the master control system through the network, and the master control system controls each joint movement of the composite robot through linear interpolation, finally realizing the precise control of the position and pose of the camera at the end of the mechanical arm.
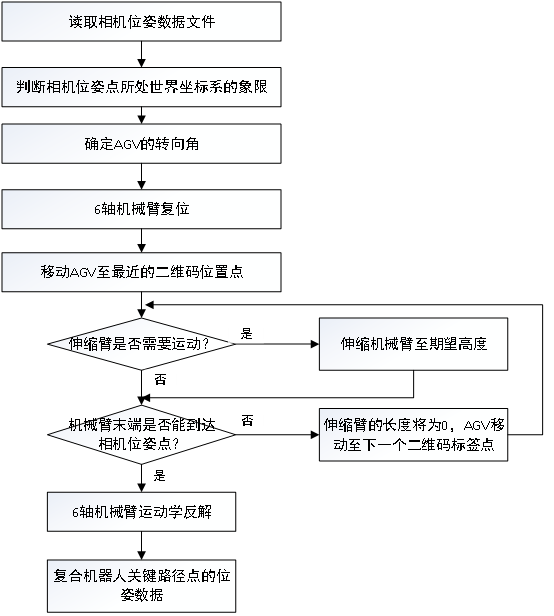
Figure 1 Overall framework of trajectory planning for composite robot
All Rights Reserved:Shanghai Ruiyouzhun Intelligent Control Technology Co., Ltd. 苏ICP备08106440号

