
Use 3D modeling software to model the composite robot, convert the format of the model, export it to the format file officially recommended by Unity3D, and finally import it into Unity3D software to complete the construction of the simulation model and establish a digital twin display environment.
Through TCP/IP communication protocol, the real-time pose data and operation status information of the composite robot are obtained, relevant data are read and analyzed, the position and pose of the robot are updated in real time, and the composite robot is dynamically rendered and displayed.
3. System rendering
The main interface of 3D visual digital simulation system is shown in Figure 2.
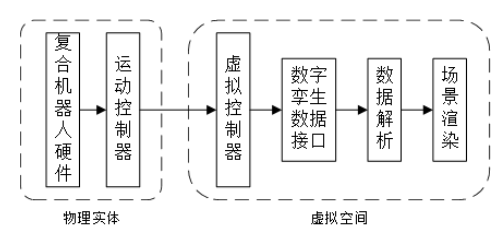
Figure 1 Data Flow Chart of 3D Visual Simulation System
Use 3D modeling software to model the composite robot, convert the format of the model, export it to the format file officially recommended by Unity3D, and finally import it into Unity3D software to complete the construction of the simulation model and establish a digital twin display environment.
Through TCP/IP communication protocol, the real-time pose data and operation status information of the composite robot are obtained, relevant data are read and analyzed, the position and pose of the robot are updated in real time, and the composite robot is dynamically rendered and displayed.
3. System rendering
The main interface of 3D visual digital simulation system is shown in Figure 2.
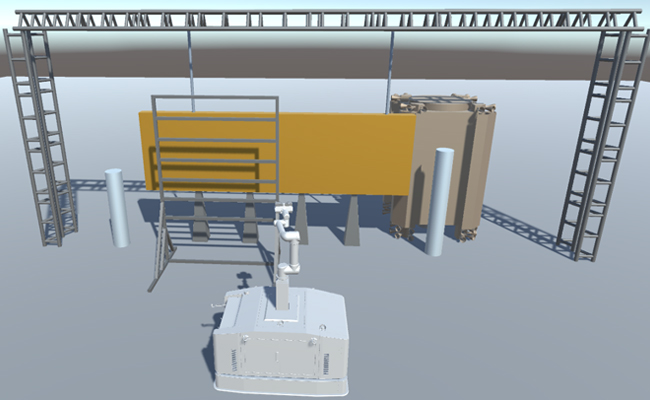
Figure 2 Main Interface of 3D Visual Simulation System
All Rights Reserved:Shanghai Ruiyouzhun Intelligent Control Technology Co., Ltd. 苏ICP备08106440号

