
1、任务说明
复合机器人轨迹规划系统的主要任务就是综合考虑三维空间尺寸及机器人的作业半径及动力学约束,利用空间优化算法,对复合机器人的运动路径及与运动轨迹进行优化,确保机器人在无碰的环境下进行高精度拍摄作业,最终输出各拍摄目标点位及拍摄过渡点位的复合机器人位姿信息。
2、系统总体框架
复合机器人轨迹规划系统的总体框架如图1所示,该系统的主要功能如下:
(1)根据复合机器人的结构尺寸和测试场地大小,建立整个测量系统坐标系;
(2)在测量系统坐标系中构建复合机器人的运动学模型;
(3)在三维空间内,导入视觉测量系统拍摄点的坐标位置;
(4)调用移动机械臂轨迹规划算法,输出复合机器人拍摄作业时各个关键路径点的坐标,调用多关节插补算法,输出复合机器人各个运动关节坐标位置或关节转动角度信息;
(5)将规划出来的拍摄点点位信息通过网络发送给主控系统,由主控系统通过线性插补控制复合机器人各个关节运动,最终实现机械臂末端相机位姿精准控制。
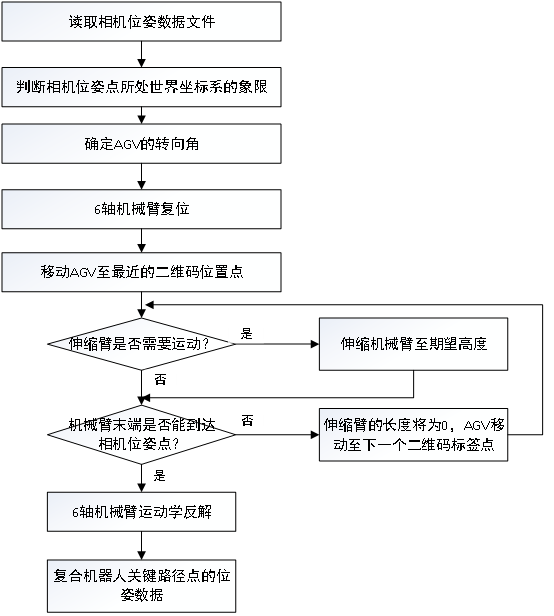
图1 复合机器人轨迹规划总体框架
版权所有:上海睿尤准智控技术有限公司 沪ICP备2022025776号

