
1、 任务说明
三维可视化仿真系统的主要任务就是实时读取由主控系统发送过来的复合机器人各个轴的位姿数据及运行状态信息,在数字空间完成三维模型的实时表征。
三维可视化仿真系统要完成的任务是在设备(包括模型)和环境技术上,使数字孪生系统的仿真环境与真实测量环境最大限度地等效;在实验状态和方法上,使仿真场景内的复合机器人最大程度地映射真实场景。
2、 系统总体框架
三维可视化仿真系统采用数字孪生技术将物理实体在虚拟空间进行创建与驱动,通过数字化技术创建与物理实体完全对应的虚拟映射模型。三维可视化仿真系统采用Unity3D软件进行开发,通过Socket通信实现该系统与主控系统之间的数据传输,数据流程图如图1所示。
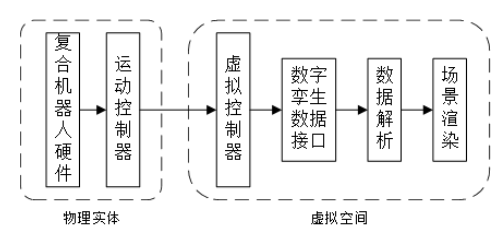
图1三维可视化仿真系统数据流程图
使用三维建模软件对复合机器人进行3D建模,对模型进行格式转换,并将其导出为Unity3D官方推荐的格式文件,最后将其导入Unity3D软件中,完成仿真模型的搭建,建立数字孪生显示环境。
通过TCP/IP通信协议获取复合机器人的实时位姿数据与作业状态信息,对相关数据进行读取和解析,实时更新机器人的位置和姿态,对复合机器人进行动态渲染和显示。
3、系统效果图
三维可视化数字仿真系统主界面如图2所示。
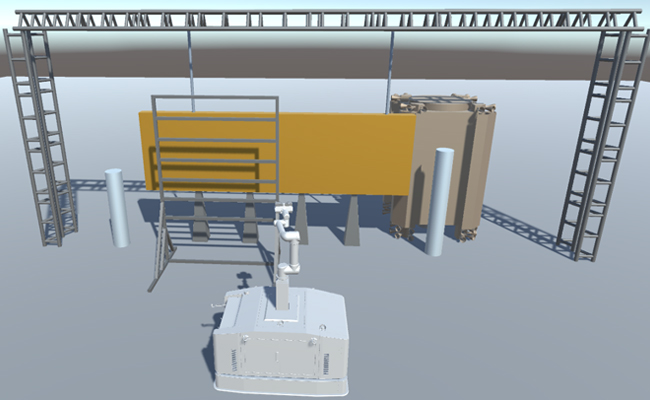
图2三维可视化仿真系统主界面
版权所有:上海睿尤准智控技术有限公司 沪ICP备2022025776号

